

OpenQDD V1 (06/21/2023)
About
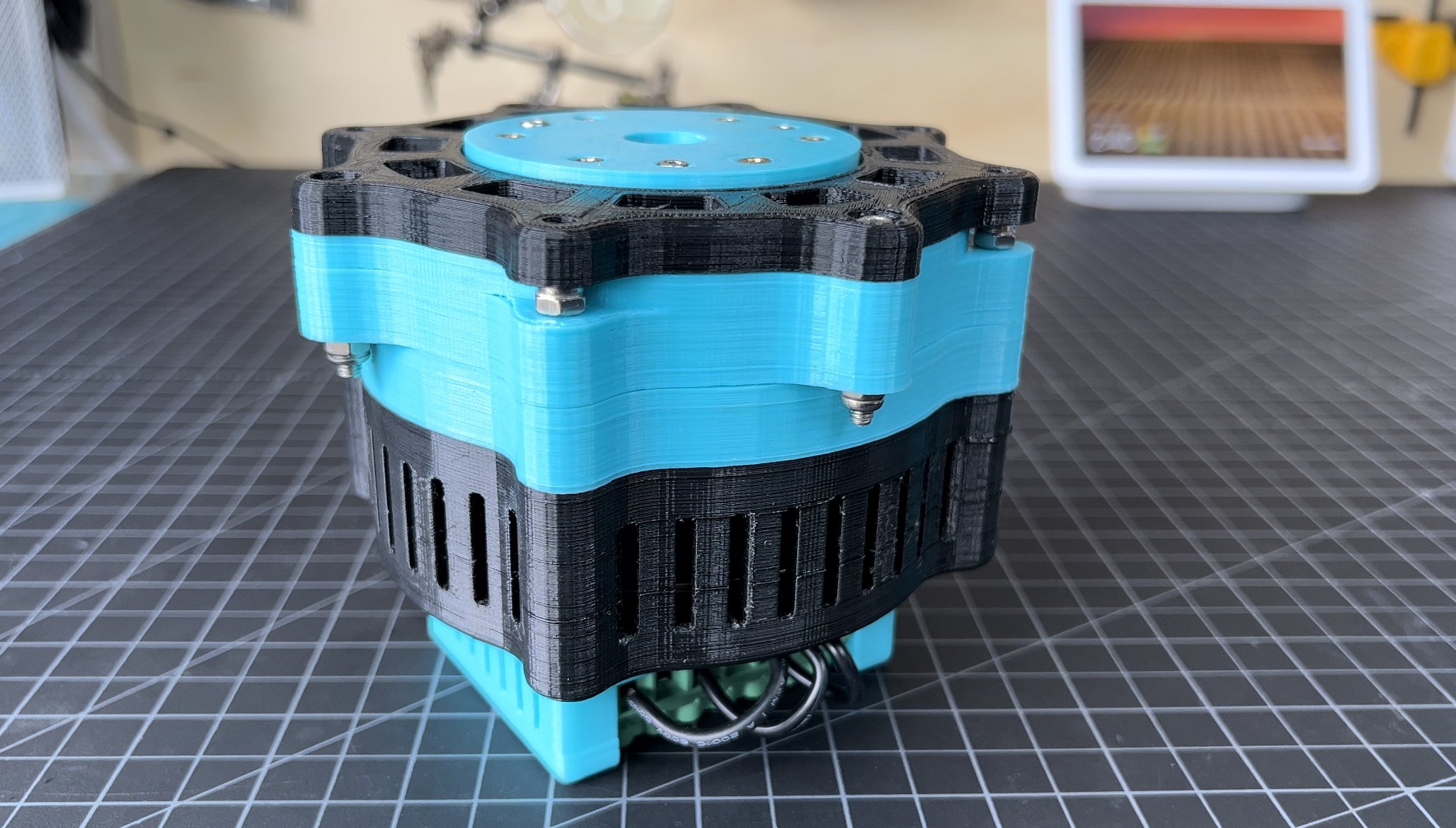
OpenQDD is a 3D-printed open-source robotic actuator that I designed to be a powerful, easy-to-build, and relatively inexpensive solution to creating dynamic robots. Robots like Spot, Atlas, and the MIT mini cheetah easily impress the eye with their agility, speed, and overall ability to mimic natural motion. With OpenQDD, creating high-performing actuators at an affordable price is possible.
Github (For CAD, Code, and BOM)
This project is heavily inspired by the OpenTorque actuator made by Gabrael Levine as well as the Cycloidal Actuator made by James Bruton. These open-source actuators follow the same working principle as OpenQDD and are also fully 3D printed.
Specifications
9:1 Planetary Gear Set with Helical Gears
ODrive S1 FOC Controller with an Onboard Encoder
13x 3D Printed Parts
Air Vents for Passive Cooling
Peak Holding Torque: 16.36 Nm
Total Mass: 935g
Total Cost: $247

Quasi Direct Drive (QDD)
The QDD scheme was created by MIT and implemented in the Mini Cheetah. A QDD actuator is made with two key components.
A brushless motor with a large gap radius to maximize torque density.
A gear drive with a low gear reduction (generally between 3:1 and 10:1) for high torque output, high efficiency, and high backdrivability.
About the Design
The actuator uses a 90KV Eagle Power BLDC Motor as well as an ODrive S1 FOC controller. In closed-loop control mode, the S1 allows you to control the position, velocity, and torque of a brushless motor. With an onboard encoder, the S1 rests on the bottom of the actuator in order to measure the BLDC motor’s position. The top of the actuator features a 9:1 planetary gear drive. I’ve designed helical gears for the gearbox since they are preferred for high-load applications and reduce noise. The actuator design also features the output bearing on the inside of the assembly meaning that OpenQDD doesn’t need a gearbox cover to operate.